頑丈な差動弱まるAGVのロボット車輪のサーボ モーター ドライブ
指定
|
項目
|
モーター データ
|
|
モデル
|
ZL-B543 |
|
モーター タイプ
|
DC/AC |
|
力S2-60分
|
3000 W
|
|
率の電圧
|
48V
|
|
率の速度
|
3000 r/min
|
|
率のトルク
|
15 Nm
|
|
率の流れ
|
80 A
|
|
ギヤ比率
|
50 I |
|
車輪径
|
270*270 mm
|
|
ドライブ速度
|
30 m/min |
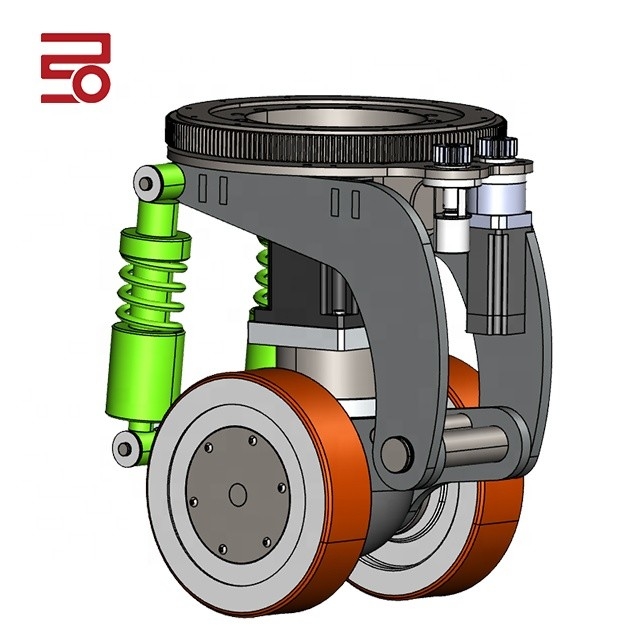
記述
ZLの車輪ドライブは1つの短い単位の車輪、統合された惑星の変速機および忍耐から成っている。車輪ドライブをサービス ロボットまたはAGVsのような自走式システムの開発そして生産を、簡単にする密集したシステムの私達のモーターそしてコントローラーの結果と結合する。
スペース節約の設計
抵抗の高い放射状の負荷
利用できる異なった車輪径
、またブレーキおよびエンコーダーはモーターの広い範囲と結合することができる
車輪ドライブは取付金具の有無にかかわらず発注することができる。シリーズ生産のためにNanotecはまた特別な複合材料からなされるpress-onタイヤを提供する。
ZLの車輪ドライブは異なったサイズでモーターを伴って利用できる
機能
1. 最高の出力密度
高い放射状の負荷および絶えず高い加速および速度
2. 長い耐用年数
長続きがするPURの車輪との効率のために設計されているドライブ
3. 維持の低レベル
部品はモジュール設計へのそれぞれ取り替えられた感謝である場合もある
4. 理性的なドライブ
任意センサー システムを使用してプラグ及び演劇機能そして中央変数点検
5. 統合のHigh-level
最低の重量が付いている密集したスペースで収容されるすべての機能要素
6. 広範囲コミュニケーション
標準インターフェース(例えばRS485/Canopen、等)のおかげでe車軸として広範囲ドライブ制御システム
![]()
![]()
![]()