-
ハイライト
600kg AGVの自治導かれた車
,AGVの自治導かれた車
,600kg自己は車を導いた
-
中心の部品PLCのモーター
-
適用物品取扱い
-
次元L1875*W580*H350
-
ペイロード600kg
-
動き二方向
-
材料ステンレス鋼
-
重量(KG)250
-
証明書セリウム
-
起源の場所広州、中国
-
ブランド名ZHLUN
-
証明ISO9001
-
モデル番号ZL-TR-K1
-
最小注文数量交渉可能
-
価格Negotiable
-
パッケージの詳細パッキング:木箱
-
受渡し時間25日
-
支払条件L/C、T/T、ウェスタン・ユニオン
-
供給の能力1ヶ月あたりの1000部分
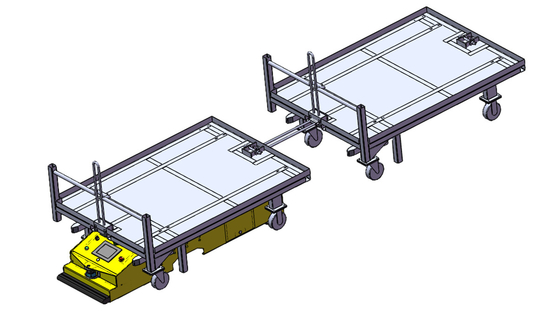
二方向600kg AGV自治導かれた車の自己は車を導いた
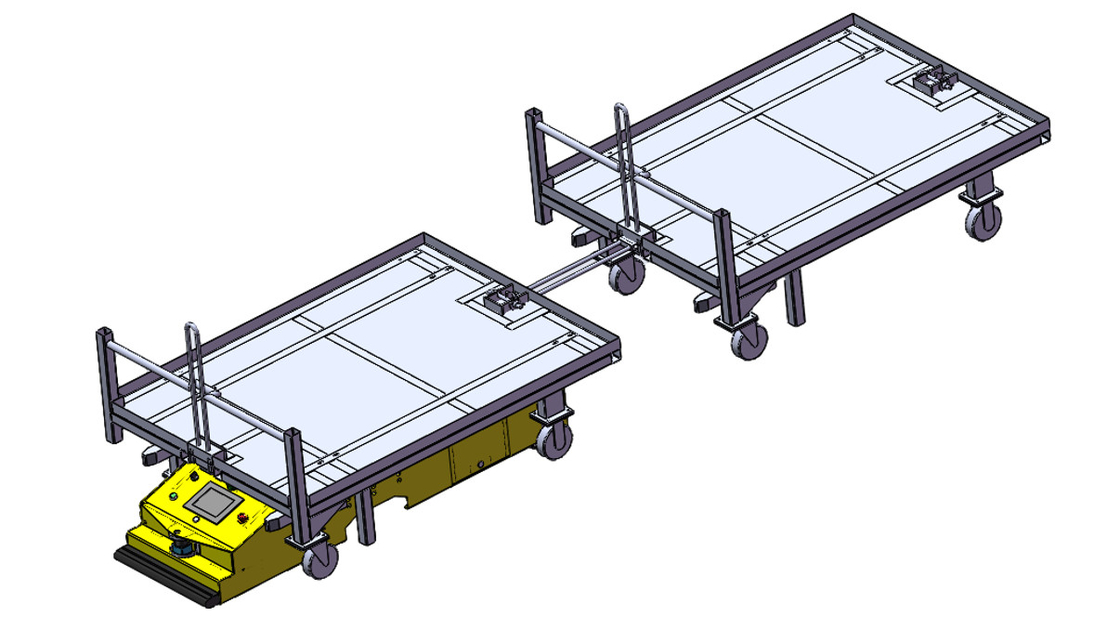
AGV Logitechの駆動輪企業のための自動ガイド車の倉庫Agv
AGVは標準軌、アルストムによって設計され、造られる高速の、電気multiple-unit列車である。アルストムは7からの245から446人を着席させる14のキャリッジに構成のAGVを提供する。列車は3台の車および単一車の運転者トレーラーから成り立つ単位から組み立てられる。最高の商業速度は360のkm/hである。
![]()
製造の工場のAGVのトロリーの適用はますます共通になっている。それは無人の処理を実現でき生産の兵站学の効率を改善するよい解決であるプロダクトからの材料への自動オンラインの、自動オフ・ラインのおよび中間の移動のオートメーションを実現する。製造業の製造工程では、AGVのためにまた達成可能である交差床の交通機関は頻繁に遂行される。現在、より強力なAGVの製造業者は床を渡る自動交通機関を達成できる。AGVの交差床の交通機関の難しさはトロリーが自動的にエレベーターに乗るAGVの技術を解決することである。
AGV車はいかにエレベーターを自動的に取るか。
エレベーターを取る次のステップにAGV車のプロセスは自動的に分けられる:
![]()
1. AGV車はエレベーター ドアおよび停止で着き、AGVの制御システムはネットワークを通してエレベーターにエレベーターの記入項目の要求指示を送る。
2. エレベーターはAGVの制御システムから信号を受け取った後、ドアを開け、ノーマル・オープンの州を維持する。そしてフィードバック エレベーターがAGVの制御システムに開いたという信号。
3. エレベーターが開いたという信号を受け取った後、AGVの制御システム問題はAGVのトロリーおよびAGVのトロリーへの運転の指示エレベーターに入る。
4. AGV車はエレベーターに入った後、エレベーターに床の指示を送る。エレベーターは指示を受け取り、エレベーターを閉め、そして指名床で着く。
5. エレベーターが指名床に達した後、エレベーターのドアはノーマル・オープンの州を開け、保つ。そしてAGVの制御システムにエレベーターのドアのノーマル・オープン信号を送りなさい。
6. AGVの制御システムは指名床で到着を受け取った後、AGVのトロリーに運転の指示を送り、AGVのトロリーはエレベーターを使用する。
7. AGVのトロリーがエレベーターを出た後、AGVの制御システムはエレベーターに信号を反映する、エレベーターのドアは閉鎖して、次の周期は入れられる。
全プロセスでは、私達はAGV車、管理システムを急派しているAGVおよび理性的なエレベーター間の相互作用としてそれを理解してもいい。それは無線ネットワークを通した管理システムを急派するAGV車およびAGVおよびエレベーター間の管理システムおよび情報交換を急派しているAGV間の相互作用を含んでいる。
![]()
あなたAGVのシステムおよびエレベーターの相互作用プロセスをと共有することは主にここにある:AGVはエレベーター登録→のエレベーターのフィードバック登録にである巧妙な→ AGVの問い合わせのエレベーターの床の→のエレベーターのフィードバックの床の→ AGVの要求適用するエレベーターのドアの→のエレベーターのドアの把握→ AGVが書き入れたり/ドアの開始要求→のエレベーターのドアの閉鎖の→のエレベーター解放を首尾よく送る出口のエレベーターの→ AGV停止。
AGVの技術の改善によって、AGVの適用シナリオは更に拡大される。将来、AGVのトロリーは多数の障害、十字の床および散らかされた倉庫のような複雑な仕事のシナリオに合わせられるもっとプロセスを扱う兵站学の安全、安定性、信頼性および秩序性を保障できる。
|
項目
|
指定
|
|
モデル
|
ZL-TR-K1 |
|
次元
|
L1875*W580*H350
|
|
ガイド方法
|
磁気運行
|
|
歩く方向
|
先に、雄牛、背部
|
|
前方速度
|
90m/min
|
|
収容量
|
600Kg
|
|
電池
|
リチウム電池
|
|
充満方法
|
無線充満
|
|
電気表示の方法
|
電子表示
|
|
間隔を感じる安全
|
3m
|
|
警報形態
|
音楽警報および軽い警報
|
|
パワー系統
|
BLDCモーター
|
|
セキュリティ システム
|
赤外線障害回避、機械anti-collision設計、非常停止ボタン
|
工場映像
![]()
![]()
![]()